

株式会社Enacticが完全オープンソースプラットフォームのロボットアーム『OpenArm』をリリース
ヒューマノイドの社会実装とフィジカルAIの未来を拓く
- BUSINESS:R&D
- OCCUPATION:DATA SCIENTIST
.jpg?width=1832&height=1220&fit=cover&format=webp&quality=90)
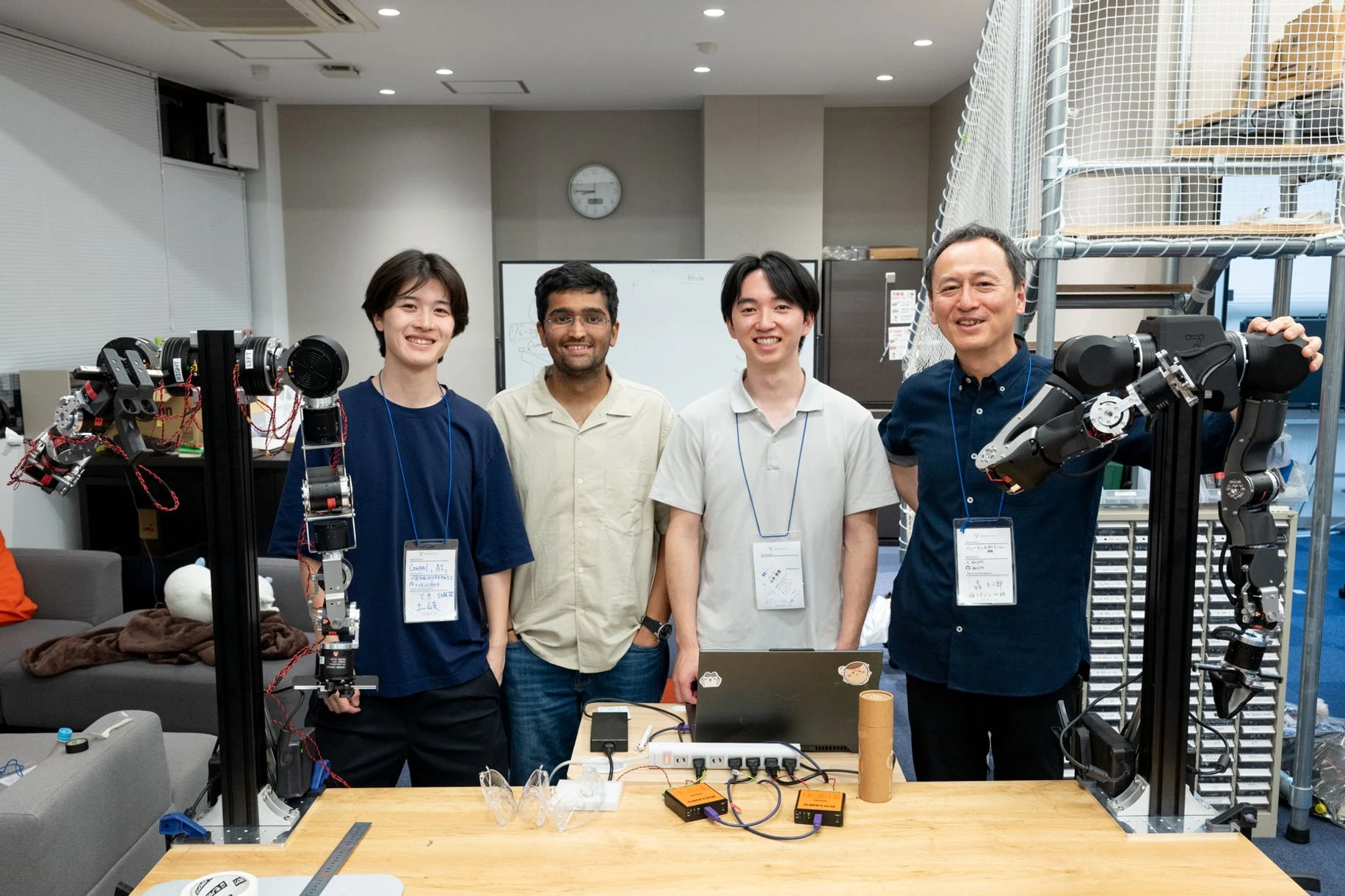
2025年7月23日、株式会社レアゾン・ホールディングス(以下、レアゾンHD)は、研究成果の事業化を目指す子会社株式会社Enactic(以下、Enactic)を設立した。同時に、誰もがロボット開発に参加できるオープンソースプラットフォーム「OpenArm」 を発表。同月25日にはお披露目会が開催された。イベントでは、Enacticの山本泰豊代表らにより「OpenArm」の概要とプラットフォーム構想を詳しく紹介した。さらに質疑応答セッションに加えて、参加者が実際にOpenArmを操作できる体験会も実施された。本記事では、そのレポートに加え、山本代表に、現状のヒューマノイドAI市場の拡大可能性、プロダクト開発やこのタイミングでの新会社設立の動機、また実現したい将来像などについて聞いた。
INDEX
新会社Enactic設立の背景と代表のビジョン:社会実装を目指すヒューマノイドAIの未来
レアゾンヒューマンインタラクション研究所は、4年前にレアゾンHDのR&D部門として発足以来、高精度なオープンソースの音声認識モデル「ReazonSpeech」を公開するなど、その技術力を示してきた。その後、研究の中心はロボティクスとフィジカルAIへ移行し、現在では最も注力する分野となっている。
今回「OpenArm」のリリースと同時に設立された新会社「株式会社Enactic」は、家庭や介護現場で人を支援する、安全性と実用性を兼ね備えたヒューマノイドロボットの開発と普及に特化した企業である。実環境での体験や人との触れ合いを通じて学習することにより、人間の意図や感情、状況に応じた適切な判断・行動が取れるようなフィジカルAIの実現を目指す。
OpenArmとは?
「OpenArm」は誰もがアクセス可能なオープンソースロボットプラットフォームとして、ヒューマノイドの社会実装とフィジカルAIの未来を切り拓くことを目的とした取り組みである。2025年2月のベータ版リリース以降、世界中の大学・企業・研究機関の開発者や研究者から問い合わせが寄せられており、Discordやgithubの開発コミュニティも急速に成長している(Discord参加メンバー900名以上。githubではstar数>800、fork数>100)。
OpenArmの発表概要

山本代表は、前回のオープンアーム勉強会(4月後半開催)から約3ヶ月の準備期間を経て、7月23日に「OpenArm」の正式リリースを発表した。以下に発表内容の概要を紹介する。
製品概要と特徴
「OpenArm」は、完全オープンソースのヒューマノイドロボットアームでありロボットAI研究の共通基盤となることを目指している。
- スペック: 7軸の双腕アームで、人間の寸法(リーチ63cm)に合わせて設計されている。片腕の重量は約5.5kg、ピークペイロードは片腕で6kgである。高い制御周波数(1kHz)でのバイラテラル制御(操作者と対象物の間で力感覚を相互に伝達する制御方式)。
- 設計思想: ロボットの自由度も医学的な人間の自由度の平均値を参考に設計されており、人間とほぼ同じ自由度を持っている。安全性を重視し、狭い場所での挟み込みを防ぐための設計も意識されている。
- ウェブサイトとドキュメンテーション: ウェブサイト(openarm.dev)では、概要やビジュアル、そしてウェブ上で試せるシミュレーターが提供されており、ユーザーはOpenArmの動作を試すことができる。ハードウェアのアセンブリーガイドやBOM(部品表)、ソフトウェアSDKやチュートリアルも充実している。
- 開発コミュニティ: 「OpenArm」プロジェクトは、ユーザーと一緒に育てるオープンソースプロジェクトである。GitHubリポジトリでは、イシューをアイデアプールとして活用し、プロジェクトのアイデアや「こんな機能が欲しい」といったリクエスト、バグの報告などを自由に投稿できる。気になるアイデアにはアップボートで応援したり、スレッド内で活発な議論に参加したりコミュニティ主導で開発が進められるのも魅力的である。他の開発者やEnacticチームと連携したい場合は、Discordチャンネルへ参加し、そこで新たなつながりを作ったり、プロジェクトごとに共同開発者を募ったり密なコミュニケーションをとることもできる。ソフトウェアはApache 2.0ライセンス、ハードウェアはCERN-OHL-Sライセンスの下で公開されており、誰もが参照・編集・製造しやすい設計となっている。この開かれた環境で、共にOpenArmを進化させていくことが期待されている。

実機デモンストレーションで示された制御技術と安定性
概要説明の後は、Q&Aセッション、そしてOpenArmのデモンストレーションの観覧が行われた。実際に参加者が手に触れ、エンジニア達から具体的な機能が説明された。
まず、基本的なユニラテラル制御が実演された。これは、オペレーターの指示する位置情報のみがフォロワー側へ一方向に伝わる制御方式である。デモンストレーションでは、「リーダーフォロー」と呼ばれるこの制御方式が体験された。リーダー側をどれだけ叩いたり引っ張ったりしても、フォロワー側には全く影響が伝わらず、非常に安定した動作が確認された。比較的重いシステムであるにもかかわらず、軽く動かすことができ、さらに手を離してもその場で姿勢を維持できる、重力補償の効果による操作性の向上が示された。
.jpg?width=1832&height=1832&fit=inside&format=webp&quality=90)
.jpg?width=1832&height=1832&fit=inside&format=webp&quality=90)
次に、力覚フィードバックを伴うバイラテラル制御の重要性が説明された。土岐氏の操作により、「触った感触」の重要性が伝えられた。OpenArmは、力センサーなしで力や外乱を推定し、力・位置を同時に行う制御方式を採用している。特に「服を畳む」や「物を拭く」といったコンタクトリッチ(接触が多い)なタスクにおいて、力覚が安全で実用的なロボットに不可欠であるとされた。
まとめ:Enacticが描く未来
OpenArmのお披露目会は、その多機能性、オープンソースとしての拡張性、そしてEnactic社の「安全で実用的なヒューマノイドの社会実装」という明確なビジョンを強く印象付けた。
Enacticは、介護業界、サービス業界や家庭において、人の生活を支援する「安全で実用的なヒューマノイドの導入」を推進する。実世界でのデータ収集を拡大することで基盤モデルの開発を促進し、特に人材不足が叫ばれる介護業界などにおいて、人とともに働くことで現場の生産性向上を目指していく。
OpenArmウェブサイト: https://openarm.dev
OpenArmに関するアップデートやアナウンス:@enactic_ai
この記事をシェアする

%20--%3e%3csvg%20version='1.1'%20id='レイヤー_1'%20xmlns='http://www.w3.org/2000/svg'%20xmlns:xlink='http://www.w3.org/1999/xlink'%20x='0px'%20y='0px'%20viewBox='0%200%2030%2030'%20style='enable-background:new%200%200%2030%2030;'%20xml:space='preserve'%3e%3cstyle%20type='text/css'%3e%20.st0{fill:none;}%20%3c/style%3e%3crect%20class='st0'%20width='30'%20height='30'/%3e%3cg%3e%3cpath%20d='M23.2,0H6.8C3,0,0,3,0,6.8v16.5C0,27,3,30,6.8,30h16.5c3.7,0,6.8-3,6.8-6.8V6.8C30,3,27,0,23.2,0z%20M22.9,18.6%20c-2.1,2.4-6.8,5.4-7.9,5.8c-1.1,0.5-0.9-0.3-0.9-0.5c0-0.2,0.1-0.9,0.1-0.9c0-0.3,0.1-0.7,0-0.9c-0.1-0.3-0.6-0.4-0.9-0.5%20c-4.8-0.6-8.4-4-8.4-8c0-4.5,4.5-8.1,10-8.1s10,3.6,10,8.1h0C25,15.4,24.3,17,22.9,18.6z'/%3e%3cpath%20d='M21.7,11.4h-2.8c-0.1,0-0.2,0.1-0.2,0.2v0V16v0c0,0.1,0.1,0.2,0.2,0.2h2.8v0c0.1,0,0.2-0.1,0.2-0.2v-0.7%20c0-0.1-0.1-0.2-0.2-0.2h-1.9v-0.7h1.9c0.1,0,0.2-0.1,0.2-0.2v-0.7c0-0.1-0.1-0.2-0.2-0.2h-1.9v-0.7h1.9c0.1,0,0.2-0.1,0.2-0.2v-0.7%20C21.9,11.5,21.8,11.4,21.7,11.4z'/%3e%3cpath%20d='M11.3,15.1H9.4v-3.5c0-0.1-0.1-0.2-0.2-0.2H8.5c-0.1,0-0.2,0.1-0.2,0.2V16v0c0,0.1,0.1,0.2,0.2,0.2h2.8h0%20c0.1,0,0.2-0.1,0.2-0.2v-0.7C11.5,15.2,11.4,15.1,11.3,15.1z'/%3e%3cpath%20d='M13,11.4h-0.7c-0.1,0-0.2,0.1-0.2,0.2V16c0,0.1,0.1,0.2,0.2,0.2H13c0.1,0,0.2-0.1,0.2-0.2v-4.4%20C13.2,11.5,13.1,11.4,13,11.4z'/%3e%3cpath%20d='M17.8,11.4L17.8,11.4l-0.7,0c-0.1,0-0.2,0.1-0.2,0.2v2.6l-2-2.7c0,0,0,0,0,0h0c0,0,0,0,0,0l0,0c0,0,0,0,0,0c0,0,0,0,0,0%20c0,0,0,0,0,0c0,0,0,0,0,0c0,0,0,0,0,0c0,0,0,0,0,0c0,0,0,0,0,0l0,0c0,0,0,0,0,0c0,0,0,0,0,0c0,0,0,0,0,0c0,0,0,0,0,0c0,0,0,0,0,0%20c0,0,0,0,0,0c0,0,0,0,0,0H14c-0.1,0-0.2,0.1-0.2,0.2V16c0,0.1,0.1,0.2,0.2,0.2h0.7c0.1,0,0.2-0.1,0.2-0.2v-2.6l2,2.7c0,0,0,0,0,0%20l0,0c0,0,0,0,0,0c0,0,0,0,0,0c0,0,0,0,0,0s0,0,0,0c0,0,0,0,0,0c0,0,0,0,0,0h0c0,0,0,0,0,0h0.7c0.1,0,0.2-0.1,0.2-0.2v-4.4%20C18,11.5,17.9,11.4,17.8,11.4z'/%3e%3c/g%3e%3c/svg%3e)
%20--%3e%3csvg%20version='1.1'%20id='レイヤー_1'%20xmlns='http://www.w3.org/2000/svg'%20xmlns:xlink='http://www.w3.org/1999/xlink'%20x='0px'%20y='0px'%20viewBox='0%200%2030%2030'%20style='enable-background:new%200%200%2030%2030;'%20xml:space='preserve'%3e%3cstyle%20type='text/css'%3e%20.st0{fill:none;}%20%3c/style%3e%3crect%20class='st0'%20width='30'%20height='30'/%3e%3cpath%20d='M15,0C6.7,0,0,6.7,0,15c0,7.5,5.5,13.7,12.7,14.8V19.3H8.8V15h3.8v-3.3c0-3.8,2.2-5.8,5.7-5.8c1.6,0,3.4,0.3,3.4,0.3v3.7%20h-1.9c-1.9,0-2.4,1.2-2.4,2.3V15h4.2l-0.7,4.3h-3.5v10.5C24.5,28.7,30,22.5,30,15C30,6.7,23.3,0,15,0z'/%3e%3c/svg%3e)
- Copied!
.jpg?width=168&height=112&fit=cover&format=webp&quality=90)
.jpg?width=168&height=112&fit=cover&format=webp&quality=90)
(1).avif?width=300&height=300&fit=cover&format=webp&quality=90)